AECtech+ 2026 | Los Angeles
AECtech Los Angeles 2026 was the 3rd LA based event hosted by Thornton Tomasetti | CORE studio, in partnership with HKS and ZAHNER. The event brought together around 100 forward-thinking professionals representing 40 organizations from 21 cities to explore the prototyping across the digital and physical world.

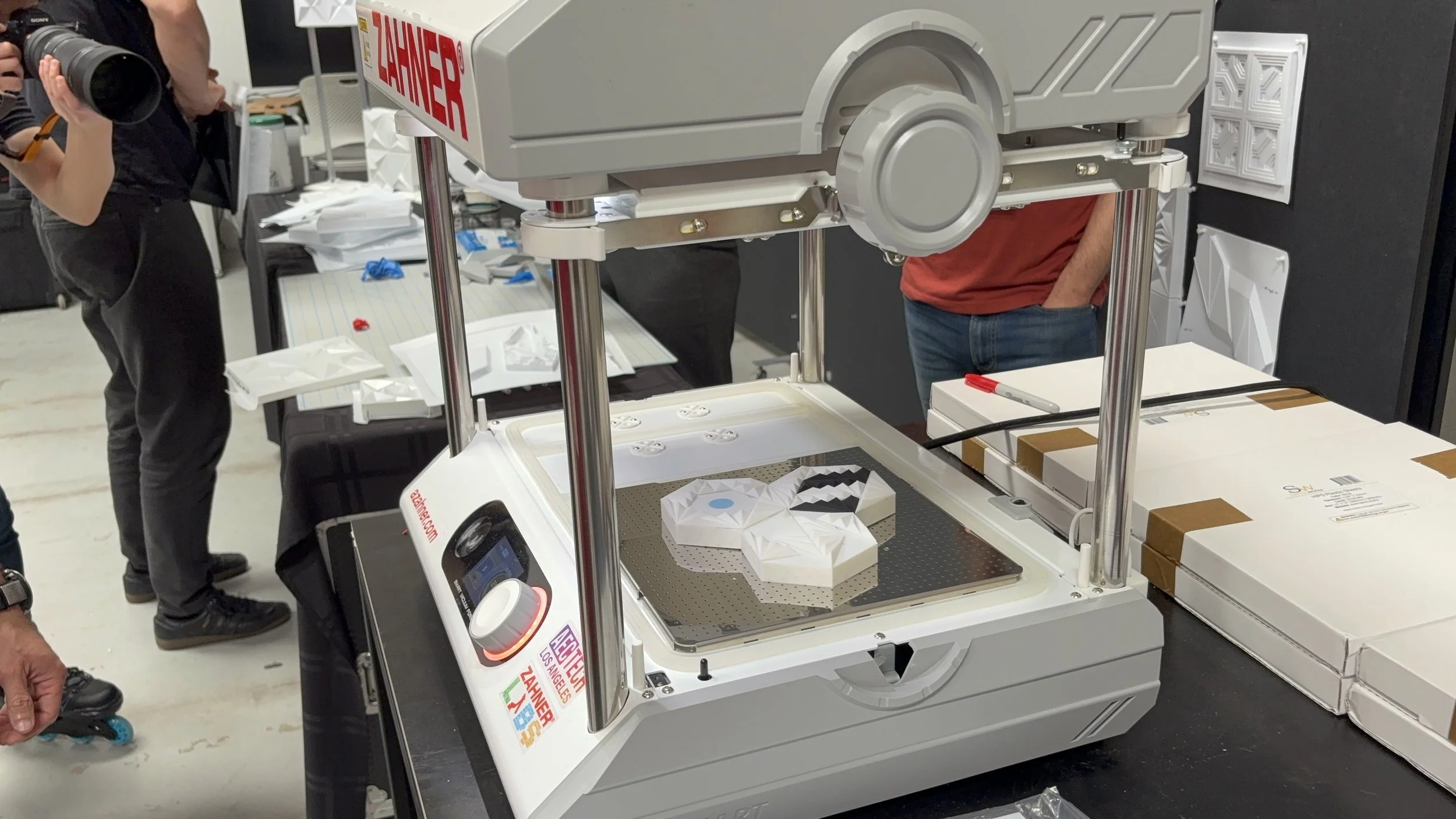
ZAHNER & HKS Workshop | Selective Patina

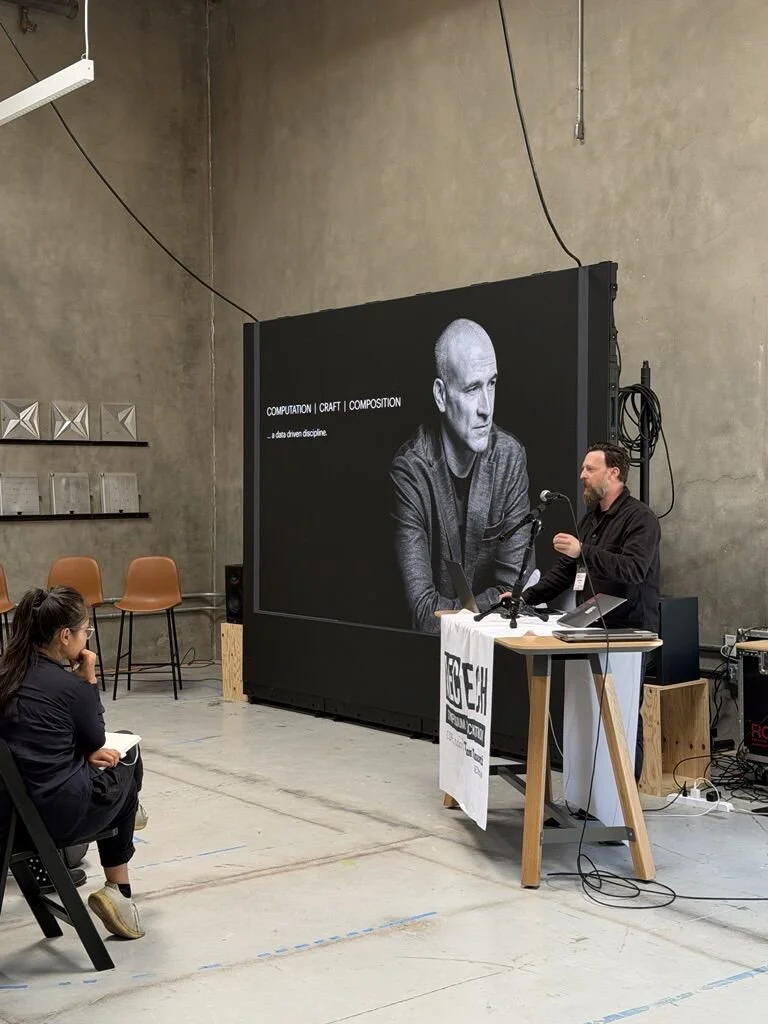
AECtech LA Symposium | Buro Happold
Symposium

AECtech LA Symposium | ZAHNER
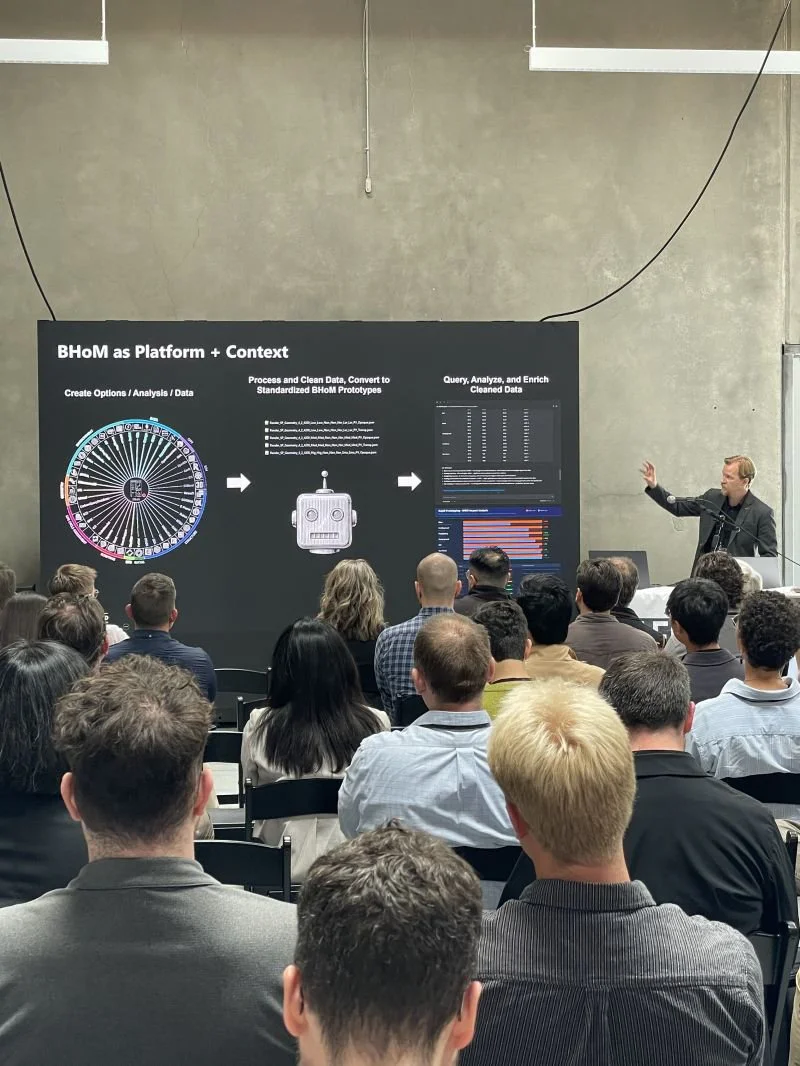
AECtech LA Symposium | Buro Happold
AECtech LA Symposium | HKS
The event kicked off with a half day Symposium on Thursday, May 28th. This Symposium brought together an exceptional group of architects, engineers, fabricators, and innovators to explore the future of design technology with a particular emphasis on fabrication, prototyping, robotics, and advanced manufacturing.
AECTECH LA 2026 | SYMPOSIUM SPEAKERS


















ROUNDTABLE | FABRICATION & PROTOTYPING





Dr. David Gerber
Director of the Civil Engineering Building Science Program
Director of the MasterS of Science EmTech in Construction Program
Associate Director, Office of Technology Innovation & Entrepreneurship
University of Southern California

Workshops
Combinatorial Tooling: From Few Molds to Many Panels

HKS Architects | LINE + ZAHNER
Most panel fabrication relies on a one-to-one logic: each unique geometry requires its own mold. This makes variation expensive and limits the potential of processes like hydroforming, where complex geometry and surface articulation can be formed in a single step—but only if tooling allows it.
This workshop proposes an alternative approach. Instead of designing one mold per panel, participants will develop a small set of reusable mini-block molds with defined edge relationships and rotational symmetry. These components can be recombined within a fixed panel boundary to generate a wide range of configurations. The relationship flips: few molds → many panels.
Using vacuum forming as a proxy for hydroforming, participants will prototype tooling systems that can translate to industrial production. Panels are subdivided into a set of positions populated by modular blocks, where variation emerges through the number of block types, their placement, and their orientation. Even a limited set of components can produce many unique panels while maintaining a consistent outer boundary.
Working in teams, participants will design mini-block geometries, cnc mill molds, and vacuum form thermoplastic sheets. These panels are assembled into a larger system using a dual-shell approach, pairing an outer articulated surface with an inner structural layer. Together, they form a sandwich panel with a cavity for insulation and integration into architectural assemblies.
Over the course of the day, participants will collectively construct a full-scale partition wall composed of combinatorially unique panels. These panels absorb variation internally while maintaining consistent edges for assembly.
More broadly, the workshop proposes a shift from geometry-driven fabrication to rule-based systems, where variation is generated through combinatorial logic rather than additional tooling. This approach enables mass customization without proportional increases in fabrication complexity, with direct relevance to hydroformed metal systems.

Calibrated Construction


SumPoint & Hathaway Dinwiddie
As a building is constructed, it exists in numerous states, growing/shrinking with temperature swings, deflecting, and translating as loading changes. This makes it difficult to know where anything is at any one point in time. On-site personnel own the difficult task of determining the project “state” and subsequent determination of what corrections are necessary. This challenge of interpreting project conditions is an opportunity for design teams to support on-site activities. 3D-modeling tools common during the design phase (such as Rhino/Grasshopper) can be used to analyze the state of an installation, determine where adjustments should be made, and feed information back to teams on-site, saving time and increasing quality. (i)
During the workshop, we will build a cardboard structure, anchored to and cantilevered from multiple existing walls. We will explore how error finds its way into physical constructions and how a combination of point clouds and parametric models can act as a feedback loop for measuring, comparing, and correcting construction as it progresses.
Together, we will install prefabricated anchor elements using traditional layout methods, following 2d documentation and physical reference points (typical workflow). Once installed, we will use a Leica Laser Scanner (capable of capturing 1,000,000 pts/sec) to capture the as-built position of our installed parts and surrounding context. Using Rhino/Grasshopper, we will analyze these as-built point clouds to quantify the differences between our as-built construction and our theoretical 3D model. This will include utilizing methods for best fitting, cloud partitioning, and statistical review of point data.
With an accurate as-built model, we will then input the actual positions of our anchors into a parametric model, adapting parts to our real-life site conditions. Adapted parts will then be batch-processed and exported for laser cutting. These adapted parts “absorb” the construction error present at the time of the scan, recalibrate site conditions to the theoretical model, and ensure successful coordination of the following scopes/parts/activities.
(i) Coleman, James. “Construction Cheat Codes.” Homing the Machine in Architecture, by Canizares, Galo, et al. Taylor & Francis, 11 Mar. 2024, pp. 177–191.

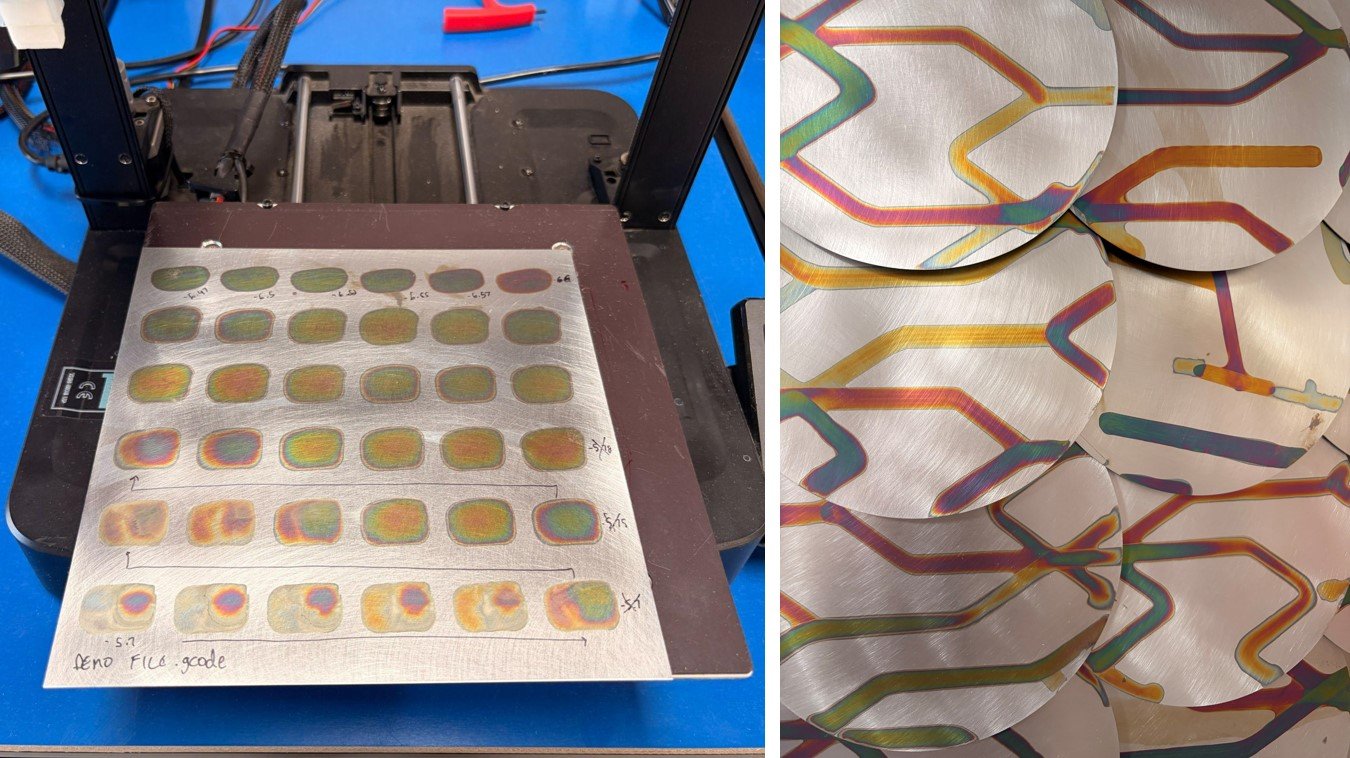
Selective Patina: Programmable Surface Design

HKS Architects | LINE + ZAHNER
Karamba3D is a parametric finite element analysis tool embedded in Grasshopper, enabling fast, interactive structural analysis within the Rhino environment. This hands-on workshop will explore how to make these powerful capabilities more accessible to non-expert users, facilitating both the rapid creation of structural models and intuitive interaction with analysis results.
Surface finishing in metal fabrication is typically treated as a uniform final step—applied after geometry is resolved and largely separate from design intent. While this ensures consistency, it limits variation and reduces surface to a passive coating rather than an active design element.
This workshop proposes an alternative approach. Rather than relying solely on geometry as the primary design variable, participants will explore how process parameters—toolpaths, motion control, applicator type, and chemical behavior—can be used to generate variation. A single geometry can produce multiple outcomes depending on how it is made.
Participants will work with a shared system of modular metal panels—each with consistent geometry and connection logic, but varied surface potential. While all panels fit into the same system, their surfaces remain open for variation. Geometry is fixed; design intent shifts to process and material response.
Using Rhino/Grasshopper, participants will design custom patterns and translate them into machine instructions. These toolpaths are executed using repurposed 3D printers and CNC plotters fitted with dabbers, brushes, and marker-based applicators that deposit patina solutions directly onto metal surfaces.
As machine motion, applicator type, and chemical composition shift, material responses change. The same toolpath can produce different outcomes depending on feed rate, deposition, and reaction. Pattern is not simply drawn, but produced through the interaction of toolpath behavior and material response.
Working in small groups, participants develop distinct pattern strategies and test how variations in toolpath, applicator, and chemistry affect surface outcomes. Each group produces a coherent set of panels, allowing multiple approaches to be explored in parallel. Throughout the day, teams produce panels reflecting their chosen parameters and design approach. These panels are assembled into a collective installation, demonstrating how consistent geometry can support a range of controlled surface expressions.
More broadly, the workshop reframes design as a system that extends beyond geometry. Chemistry, motion, and machine logic operate alongside form as active design parameters, establishing a feedback-driven workflow where making and designing continuously inform one another.


A Practical Guide to MCP & Multi-Agent Workflows

Thornton Tomsetti | CORE studio
Agentic AI and MCPs are all the rage these days, but it can be difficult to separate hype from substance. If you'd like to learn about these emerging technologies but aren't sure where to start, join our full-day workshop for a step-by-step, beginner-friendly, and AEC-focused walkthrough of the latest AI protocols. You will learn what Model Context Protocol is, how it works, and how to build your own MCP servers to help automate various design workflows. We will also take a look at MCP features in the latest release of the Swiftlet Grasshopper plugin, which will allow us to interact with a Rhino model using an LLM. From there, we will explore AI agents, how to easily build them using open-source frameworks, and how to let multiple agents collaborate with each other via the A2A (Agent to Agent) protocol.
Hackathon



On Saturday, May 30th, 40+ hackers from diverse backgrounds came together for a 26 hour hackathon blending fabrication and digital processes. Working collaboratively across disciplines, participants explored a wide array of prototype processes leveraging the facilities at HKS and showcasing the creativity, technical skill, and collaborative spirit of the AECtech community.
Thank you to this year’s panel of Judges!


Dr. David Gerber
Director of the Civil Engineering Building Science Program
Director of the MasterS of Science EmTech in Construction Program
Associate Director, Office of Technology Innovation & Entrepreneurship
University of Southern California
2026 Los Angeles Hackathon Project
BEST OVERALL HACK: DAVE
A live, physical-to-digital design tool that bridges 3D printed massing models with AI-driven parametric generation in Rhino/Grasshopper.
Sakshi Kakkad / Arup, Conor Schafer / Thornton Tomasetti | CORE studio, Ethan Kerber / ZAHNER, Sophie Moore / Thornton Tomasetti | CORE studio
MOST COLLABORATIVE HACK: Qualia
Wellness is a symptom of psychology. Qualia routes you through spaces that restore, connect, and elevate, affecting your mental state at every layer.
Ali Tabatabaie Ghomi / HKS, Daniel Merupu / AO Architects, Marc Northstar / Perkins & Will, Luiz Fernando Alves Macedo / Reer
BEST PHYSICAL HACK: MASON
A cobot, or collaborative robot, also known as a companion robot, is a robot intended for direct human-robot interaction within a shared space, or where humans and robots are in close proximity. In Architecture, we collaborate with designers, and to have a designer in the same space as you means they need to have their worth not just in function, but also knowledge to produce expected deliverables. So we hired Mason. The cobot is now a coworker.
Deniz Arslan / HKS, Bryant Callahan / LMN, Brian Murray / Hathaway Dinwiddie, Sergey Pigach / Thornton Tomasetti | CORE studio, Anthony Samaha / Perkins & Will, Bill Zahurak / Perkins & Will, Yilin Zheng / HKS, Cory Bruger / HKS, Ethan Kerber / ZAHNER
Hoppy
AI assistant for 3D design software conversations, UI overlays, and contextual explanations.
Luis Bracamontes / Avant Leap, Mark Harmon / Motif, Camerin Lee / USC, Dan Rothbart / ZAHNER, Reed Weinstock / Hoefer Welker
6 Chairs
Remigius carries semantic building objects across Revit, Rhino, and future AEC tools so the data moves, but its meaning stays intact.
Hailong Li / Gensler, Dr. Nirvik Saha / Perkins & Will, Evan Koga, Naomi Meiselman / TYLin, Vence Cai / SOM, Arsh Gupta / Cal Poly
CNC in C Major
Getting hands dirty building an acoustical interface on a shop blower fan. A CNC in C Major.
Jeffrey McGrew / BWC Architects, Melissa Mendoza / Woodbury University, Matt Seager / Perkins & Will, Luc Deckinga / Perkins & Will, Dustin Schippler / Perkins & Will, Jillian Northrup / BWC Architects

AECtech Los Angeles 2026 Hackathon Crew
